Liming YANG's PhD
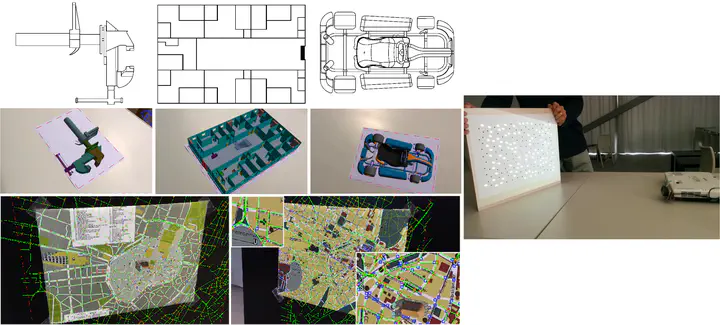 Visual summary of Liming’s PhD outcomes
Visual summary of Liming’s PhD outcomesLiming YANG’s PhD is entitled “Robust point pattern matching for Augmented Reality”, and took place between October 1st 2013 and December 7th 2016. It was directed by Guillaume MOREAU and co-supervised (50%) by myself.
Liming’s PhD is available here.
In his Phd Thesis, Liming YANG tackled a very important problem in Augmented Reality (AR): Registration. Indeed, registration provides the spatial alignment between the real environment and virtual objects. Unlike tracking (which relies on previous frame information), wide baseline localization finds the correct solution from a wide search space, so as to overcome the initialization or tracking failure problems. Nowadays, various wide baseline localization methods have been applied successfully. But for objects with no or little texture, there is still no perfect method. One possible solution is to rely on the geometric information, which sometimes does not vary as much as texture or color.
Liming YANG’s dissertation focused on new wide baseline localization methods entirely based on geometric information, and more specifically on points. Point patterns can be identified by using geometric relationships between points. Based on those assumptions, Liming’s thesis proposed:
- A novel point pattern matching algorithm (RRDM) to robustly and quickly register two 2D point sets under perspective transformation. It is validated by augmenting different kinds of paper maps of the same city with information retrieved from a Geographic Information System (GIS) with the help of road intersections.
- Another novel and general point pattern matching algorithm (LGC). It registers 2D or 3D point patterns under any known transformation type and supports multi-pattern recognitions. It has a linear behavior with respect to the number of points, which allows for real-time tracking. LGC is applied to multi targets tracking/augmentation, as well as to 3D model registration.
- A practical method for projector-camera system calibration by using random dots calibration patterns: the user only needs to manipulate a small calibration board (B4 size) for 30s to get precise and repeatable calibration results. It can be useful for large scale Spatial Augmented Reality (SAR).
###Publications:
[Yang, Normand, Moreau 2014] L. YANG, J.-M. NORMAND, G. MOREAU. “Robust random dot markers: towards augmented unprepared maps with pure geographic features”. In Proc. of the 20th ACM Symposium on Virtual Reality Software and Technology (VRST’14), Edinburgh, United Kingdom, November 11-13, 2014, pp. 45-54. doi:10.1145/2671015.2671022 (24%)
[Yang, Normand, Moreau 2015] L. YANG, J.-M. NORMAND AND G. MOREAU. “Augmenting off-the-shelf paper maps using intersection detection and geographical information systems”. In Proc. of the 14th IAPR International Conference on Machine Vision Applications (MVA 2015), Tokyo, 2015, pp. 190-193. doi:10.1109/MVA.2015.7153164 (13%)
[Yang, Normand, Moreau 2015] L. YANG, J.-M. NORMAND, G. MOREAU. Local Geometric Consensus: a general purpose point pattern-based tracking algorithm. IEEE Transactions on Visualization and Computer Graphics, vol. 21, no. 11, pp. 1299-1308, Nov. 15 2015. doi:10.1109/TVCG.2015.2459897
[Yang et al. 2016] L. YANG, H. UCHIYAMA, J.-M. NORMAND, G. MOREAU, H. NAGAHARA AND R. TANIGUCHI. “Real-time surface of revolution reconstruction on dense SLAM”. In Proc. of the 4th International Conference on 3D Vision (3DV) 2016, Stanford, USA, October 25-28, 2016. doi:10.1109/3DV.2016.13 (9.7%)
[Yang, Normand, Moreau 2016] L. YANG, J.-M. NORMAND, G. MOREAU. “Practical and precise projector-camera calibration”. In Proc. of the 15th IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Merida, Mexico, September 19-23, 2016. doi:10.1109/ISMAR.2016.22 (22.5%)
Jean-Marie Normand
Full Professor in Virtual/Augmented Reality
My research interests include perception and interaction in Virtual And Augmented Reality.