Mohamed OUTAHAR's PhD
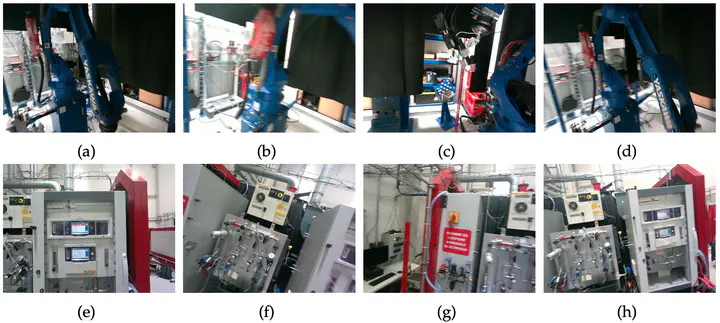 An example of complex cluttered industrial environment.
An example of complex cluttered industrial environment.Mohamed OUTAHAR’s PhD is entitled “Combining direct and indirect visual SLAM in an industrial environment”, and took place between December 3rd 2018 and May 16th 2022. It was directed by Guillaume MOREAU and co-supervised (50%) by myself.
Summary:
Augmented reality (AR) has shown great promise in various fields, including education, healthcare, and entertainment, among others. However, one area that still poses a challenge for the incorporation of AR techniques, is manufacturing. This is largely due to the inherent complexity of industrial environments from an image processing perspective, as AR relies on cameras to capture reality. AR relies on visual SLAM (vSLAM) algorithms to automatically map the unknown environment and localize the camera. The vSLAM algorithms are classified into two groups: direct and indirect algorithms. However, the behaviors of the two groups (direct and indirect) are complementary. In his thesis, Mohamed OUTAHAR proposed to simultaneously use direct and indirect methods to improve the performance of vSLAM systems.
To do so, Mohamed OUTAHAR developed two vSLAM systems and build a dataset. The first proposal of the thesis is to run two existing vSLAM systems (one direct and one indirect) simultaneously. The indirect system is used for initialization and relocalization. Once the system is initialized/relocalized, it runs the indirect system for tracking and mapping. The second proposal uses direct localization for motion estimation between frames and indirect optimization for keyframes. The last contribution of the thesis is a dataset for a benchmark in an industrial environment. The database is built from the IRT Jules Verne workshop. The second part of this contribution is a benchmark that presents the results of several vSLAM algorithms.
Publications:
- [Outahar, Moreau, Normand 2021] M. OUTAHAR, G. MOREAU, J.-M. NORMAND. Direct and Indirect vSLAM Fusion for Augmented Reality. Journal of Imaging, 2021, 7(8):141. doi:10.3390/jimaging7080141
Jean-Marie Normand
Full Professor in Virtual/Augmented Reality
My research interests include perception and interaction in Virtual And Augmented Reality.